基于事件相机的视触觉初步调研
2026-03-20
常见 Event-based Vision Tactile 的任务
- 滑移检测
- 材质辨识
- 高速平面检查
材质辨识
用两个灵巧手手指摩擦材质, Transformer 区分 20 种材质,但是仅仅依靠声学信息就获得了最佳表现, 视觉以及 optical flow 会导致 overfitting。
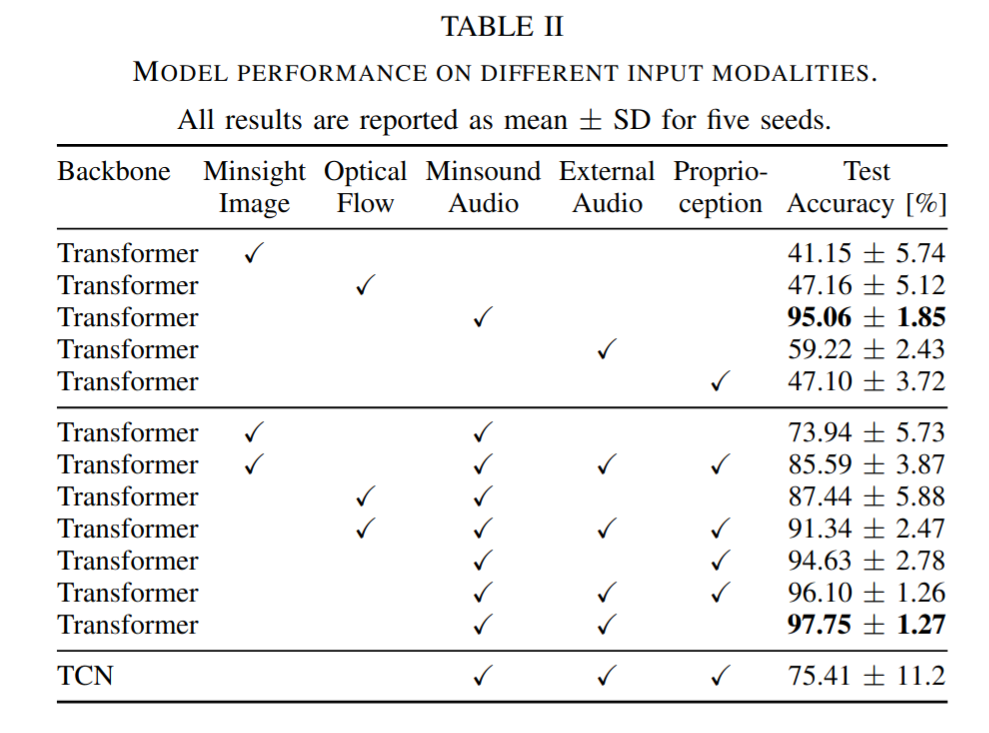
我个人认为是在有相对位移的情况下,触觉传感器感知的是力,接触面的力。 无法捕捉到接触材质的实际信息,因此导致准确度很低。
Michael Lambeta 做了一个多模态的,融合听觉视触觉的传感器,进行预训练, 通过端到端的方法做手内操作
Benjamin Ward-Cherrier 用 SNN 和 DAVIS240 做了一个材质辨识。设计 4 个简单的事件->脉冲编码, 并训练网络。识别的目标为不同凸起密度的 3D 打印材质板,以及多种明显区别的材料, 难度偏小。
后续工作中:用相同的传感器相同的数据收集策略,简化事件->脉冲编码, 识别了 10 种材料。 Benjamin Ward-Cherrier
高速平面检查
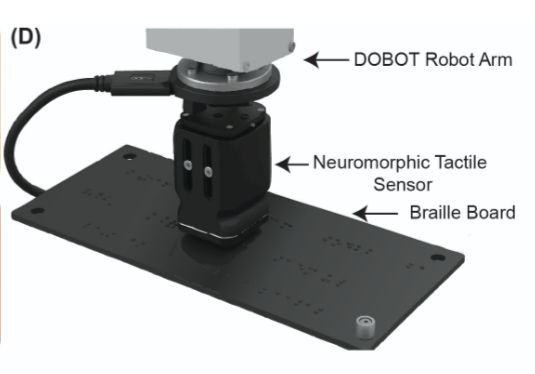
硬件是普通的平面胶体的事件相机触觉传感器 使用 CNN 进行盲文解析,将事件转换为 voxel 直接输入到网络中。 对于连续的盲文,有一个模块来区分是否处于两个盲文之间。 在 8-32mm/s 的速度下能够以约 80% 的准确率检出 1.5mm 的盲文
使用特殊的滚筒传感器,使用 DSI 显式建模凸起,然后通过凸起来解析盲文。 相较上一个需要准确的位置信息,凸起检测分辨率约 0.5mm
滑移检测
在那个仿生无人机上装了四个单点的力传感器,然后抓住重量变化的杯子等复杂物体。
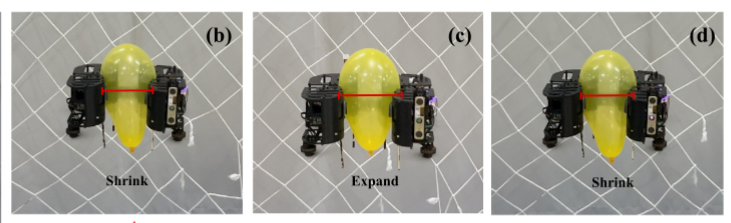
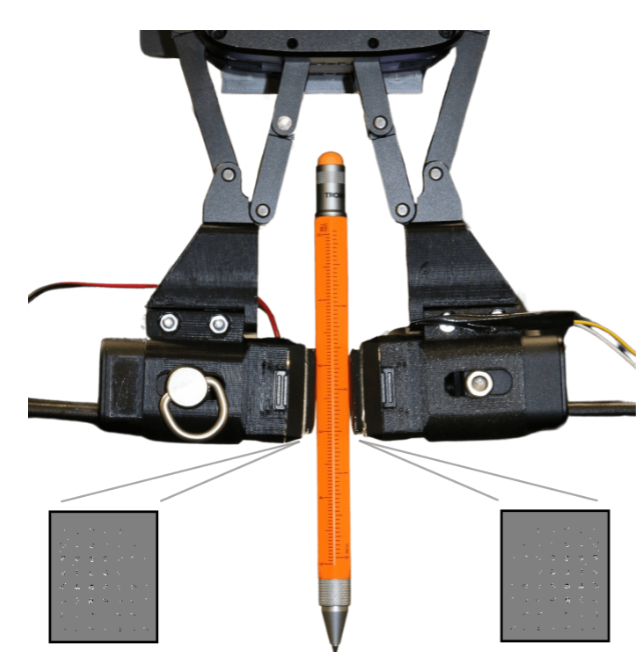
用事件相机触觉传感器加 CNN 做了滑移检测 1000Hz
硬件设计
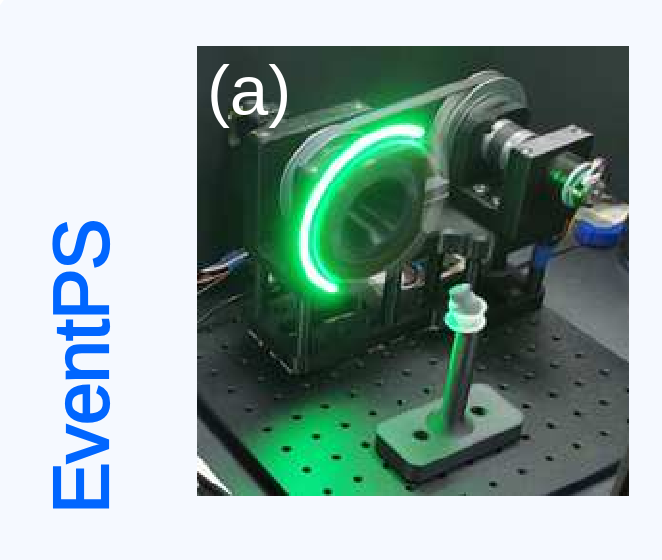
不是直接触觉,但是使用 photometric stereo 来建模物体,通过事件相机的高频特性 能够提升重建的速度(31%),并保持可接受的效果。但是物体和相机必须保持静止。
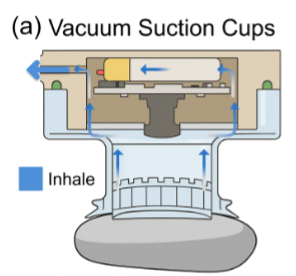
把触觉和吸盘抓取合并了。
想法
- 单纯的做一个新的传感器构型有点没意思,会花费很多时间调制硅胶, 应该利用尽可能现成的东西来做
- 目前的想法有点类似拿着锤子找钉子,我觉得应该先找到一个具体的问题, 能够缩小到很小的问题再来做
找问题的几种方式:复现别人的实验,等待灵光一线
- 视触觉传感器最重要的是它的空间分辨率,论频率比不过磁力/应变片传感器, 所以要找到一个能够足够利用空间分辨率的任务。
之前我想到一个,用事件的触觉传感器夹着一个乒乓球拍柄,球拍保持静止, 一颗球撞击球拍,通过力的变化判断撞击的位置。一个二维回归任务。 但是这个任务很难有后续的工作。
一些需要讨论的问题
- 做材质辨识是不是已经到头了,只能用 SNN 这样的东西来显得自己有创新。 视触觉目前的凝胶形式,由于凝胶本身的响应频率限制以及凝胶不适应相对滑动, 无法充分利用事件相机的高频率的特性,是否有更好的方式来做呢?
- 之前说的将事件视触觉融入一个 VLA / DP 网络,简单的做这一件事或许是可以的, 但是对于常见的任务可能不会有显著提升。
常见任务:插入接口,易碎物品抓握...